| 详细介绍:
PID定义
当今的闭环自动控制技术都是基于反馈的概念以减少不确定性。反馈理论的要素包括三个部分:测量、比较和执行。测量关心的是被控变量的实际值,与期望值相比较,用这个偏差来纠正系统的响应,执行调节控制。在工程实际中,应用最为广泛的TPC1061TI调节器控制规律为比例、积分、微分控制,简称PID控制,又称PID调节。
2.PID基本用途
它由于用途广泛、使用灵活,已有系列化产品,使用中只需设定三个参数(Kp, Ti和Td)即可。在很多情况下,并不一定需要全部三个单元,可以取其中的一到两个单元,但比例控制单元是必不可少的。
首先,PID应用范围广。虽然很多工业过程是非线性或时变的,但通过对其简化可以变成基本线性和动态特性不随时间变化的系统,这样PID就可控制了。
其次,PID参数较易整定。也就是,PID参数Kp,Ti和Td可以根据过程的动态特性及时整定。如果过程的动态特性变化,例如可能由负载的变化引起系统动态特性变化,PID参数就可以重新整定。
第三,PID控制器在实践中也不断的得到改进,下面举个改进的例子。
在工厂,总是能看到许多回路都处于手动状态,原因是很难让西门子plc控制过程在“自动”模式下平稳工作。由于这些不足,采用PID的工业控制系统总是受产品质量、安全、产量和能源浪费等问题的困扰。PID参数自整定就是为了处理PID参数整定这个问题而产生的。现在,自动整定或自身整定的PID控制器已是工业单回路控制器和分散控制系统的一个标准。
3.PID控制
① PID是闭环控制系统的比例-积分-微分控制算法。
② PID控制器根据设定值(给定)与被控对象的实际值(反馈)的差值,按照PID算法计算出控制器的输出量,控制执行机构去影响被控对象的变化。
③ PID控制是负反馈闭环控制,能够抑制216-2BD23-0XB8西门子plc系统闭环内的各种因素所引起的扰动,使反馈跟随给定的变化。闭环控制必须保证系统的是负反馈(误差=给定值-反馈值),而不是正反馈(误差=给定值+反馈值)。如果TPC1061TI系统接成了正反馈,将会失控,被控量会往单一方向增大或减小,给系统的安全带来极大的威胁。
④ PID闭环控制系统图,如下:
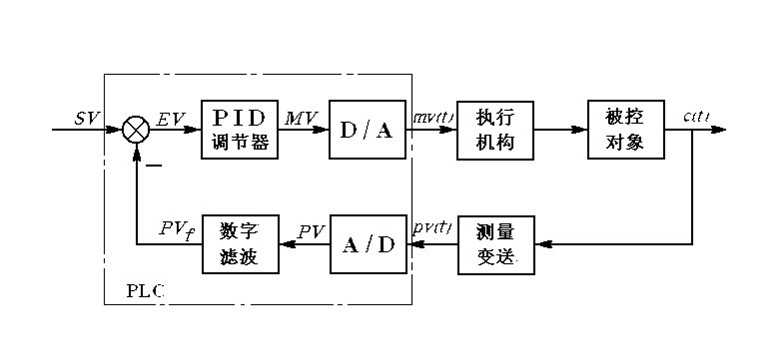
图1
举个用天然气加热炉温的例子来说明PID闭环控制系统。天然气加热被控对象为温度T,测量变送器是为热电偶,热电偶检测出的模拟信号通过模拟量输入模块(TC模块)变为与之对应的数字量,这个数字量为我们的过程变量值PV,过程变量值PV与我们的给定值SP进行比较,偏差e=SP-PV,PID控制器根据偏差值的大小来调节输出,当实际温度值小于给定值时,PID增加输出值,通过模拟量输出模块使电动调节阀开口度增加,天然气进入流量会加大,使温度升高。当实际温度值大于给定值时,PID减小输出值,通过模拟量输出模块235-0KD22-0XA8使电动调节阀开口度减小或者关闭,天然气进入流量会减小,使温度降低。通过PID控制器调节,温度最终稳定在给定值上下。
⑤ PID在S7200西门子plc中的实现
在S7-200西门子plc中PID功能是通过PID指令功能块实现。通过定时执行PID功能块,按照PID运算规律,根据当时的给定、反馈、比例-积分-微分数据,计算出控制变量。PID功能块通过一个PID回路表交换数据,这个表是在V数据存储区中开辟的,长度为36个字节。因此每个PID功能块在调用是需要制定两个要素:PID控制回路号,以及控制回路表的起始地址。
⑥ 回路控制类型的选择
在许多控制系统中,只需要一种或两种回路控制类型。例如只需要比例回路或者比例积分回路。通过设置常量参数,可以选择需要的回路控制类型。
如果不想要积分动作,可以把积分时间置为无穷大“INF”。即使没有积分作用,积分项还是不为零,因为有初值MX。
如果不想要微分回路,可以把微分时间置为零。
如果不想要比例回路,但需要积分或积分微分回路,可以把增益设为0.0。系统会在计算积分项和微分项时,把增益当作1.0看待。
⑦ 回路输入输出标准化
由于PID可以控制温度、压力、流量等许多对象,它们各自是由工程量表示,因此有一种通用的数据表示方法才能被PID功能块识别。西门子214-2BD23-0XB8中的PID功能使用占调节范围的百分比的方法抽象地表示被控对象数值大小。在实际工程中,这个调节范围往往被认为与被控对象(反馈)的测量范围(量程)一致。PID功能块只接受0.0-1.0之间的实数(实际上就是百分比)作为反馈、给定与控制输出的有效值,如果是直接使用PID功能块编程,必须保证在这个范围之内,否则会出错。其它如增益、采样时间、积分时间、微分时间都是实数。
⑧ PID正作用和反作用回路
如果增益为正,那么该回路为正作用回路。如果增益为负,那么是反作用回路。(对于增益值为0.0的I或者ID控制,如果指定积分时间、微分时间为正,就是正作用回路;如果指定值为负值,就是反作用回路。)
举两个例子来说明PID正作用回路和反作用回路:
PID正作用回路:加热炉的控制属于PID正作用控制,若温度值小于设定值,需要将PID的输出值控制的阀的开度增大,以增加天然气的流量。若温度值大于设定值,需要将PID的输出值控制的阀的开度减小,以减小天然气的流量。
PID反作用回路:在夏天控制空调制冷时,若反馈温度值低于设定温度时,需要将PID的输出值控制的阀的开度减小,以减小冷水的流量。若反馈温度值大于设定温度时,需要将PID的输出值控制的阀的开度增加,以增加冷水的流量。
| 




